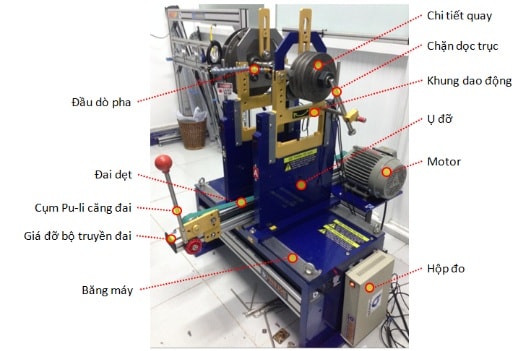
Click tham khảoMáy cân bằng động và phân tích rung động 3 kênh Adash A4300 – VA33
1. Giới thiệu
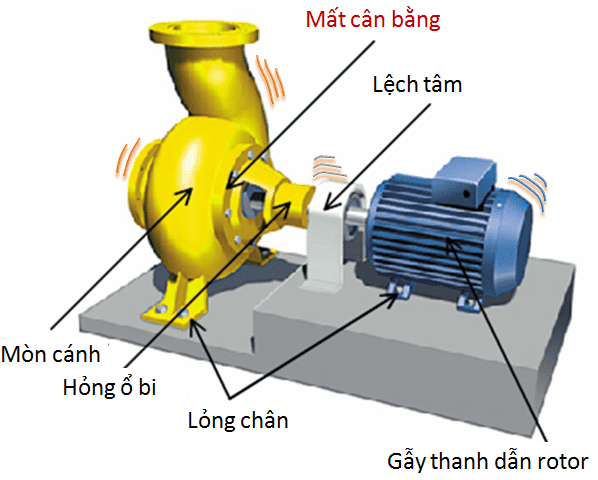
Mất cân bằng không chỉ là nguồn gây rung động thường gặp nhất trong các máy có chuyển động quay mà còn gây ra nhiều hư hại cho máy. Nó được xem như là KHUYẾT TẬT cần khắc phục trước tất cả các vấn đề khác. Mất cân bằng ở các máy quay ngày càng trở thành một yếu tố quan trọng trong việc phát triển các thiết bị hiện đại đặc biệt đối với các thiết bị đòi hỏi tốc độ /hoặc độ tin cậy cao. Sự mất cân bằng máy nói chung là một hiện tượng có hại do đó cần phải xác định và khi cần thiết phải giảm thiểu hoặc trừ khử hoàn toàn. Việc làm đó gọi là cân bằng máy hoặc cân bằng động, theo cách nói thông thường. Điều này cũng đồng nghĩa với việc tránh hư hỏng do mỏi trong các kết cấu liên quan, giảm tiếng ồn và rung động, làm tăng tuổi thọ và chất lượng của máy khi vận hành.
Đang xem: Cân bằng động là gì
Lực ly tâm và mất cân bằng:
Một rotor cân bằng thì không rung động, quay êm. Trái lại, rotor mất cân bằng khi quay tạo ra nhiều rung động, tiếng ồn, không êm. Sự khác biệt này cơ bản là do các lực ly tâm tác động lên rotor có được bù trừ hay không, còn gọi là khử mất cân bằng.
2. Lực ly tâm
Một chi tiết khi quay đều tạo ra một lực có xu hướng đẩy nó ra xa trục quay theo hướng bán kính. Lực này chính là “lực ly tâm”.
a. Rotor cân bằng
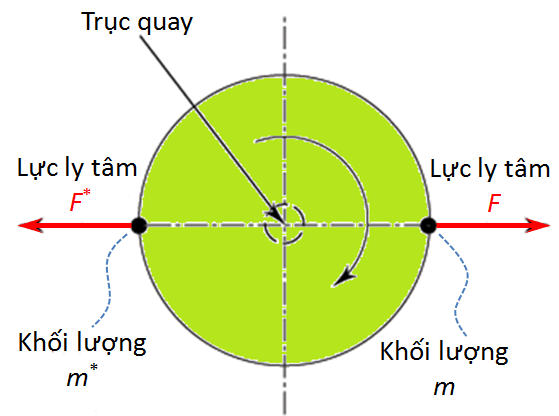
Một rotor cân bằng hoàn hảo là rotor có khối lượng được phân bố đều xung quanh trục của nó quay, không dao động khi quay. Thực tế là khi đó tất cả các lực lượng ly tâm đều được bù trừ tức bị khử. Hình dưới chỉ ra một rotor cân bằng trong đó, với một khối lượng m đặt tại một khoảng cách bất kỳ từ trục quay, tồn tại một khối lượng m*, có khối lượng bằng với m, nhưng đặt tại vị trí đối diện. Tương tự như vậy , bất kỳ lực ly tâm F tạo ra bởi chuyển động quay của m thì ngay lập tức được bù đắp bởi lực ly tâm một đối diện F*, được tạo ra bằng chuyển động quay của m*. Hai lực ly tâm này triệt tiêu nhau: rotor không dao động.
b. Rotor mất cân bằng
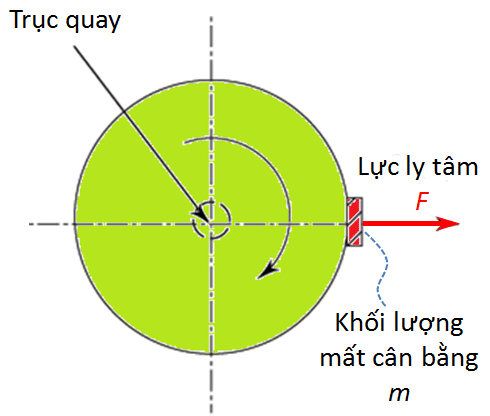
Một rotor “mất cân bằng” bởi sự hiện diện của một khối lượng m nằm trên rotor. Ở đây, không giống như rotor cân bằng đề cập ở trên, lực ly tâm F tạo ra bởi “đốm nặng” của rotor không được bù đắp bởi một lực tương đương theo hướng ngược lại.Lực ly tâm F này không được bù sẽ quay với khối lượng m và cố kéo văng rotor theo hướng tác động ly tâm của nó. Rung động sinh ra được truyền đến ổ đỡ (bạc đạn) của rotor và tất cả các điểm của ỗ đỡ sẽ phải tiếp nhận rung động này một lần mỗi vòng quay. Điều này giải thích lý do tại sao thành phần mất cân bằng luôn xuất hiện trong phổ của các dao động tại tần số quay của trục.
3. Sự mất cân bằng
a. Định nghĩa
Sự mất cân bằng, như được định nghĩa theo tiêu chuẩn quốc tế ISO 1925:2001, Mechanical vibration – Balancing – Vocabular (Dao động cơ học – Cân bằng – Từ vựng) là trạng thái mà trong đó một rotor, do kết quả của các lực ly tâm, có phát sinh một lực hay rung động truyền đến các ổ đỡ vòng bi của nó.
b. Lượng mất cân bằng
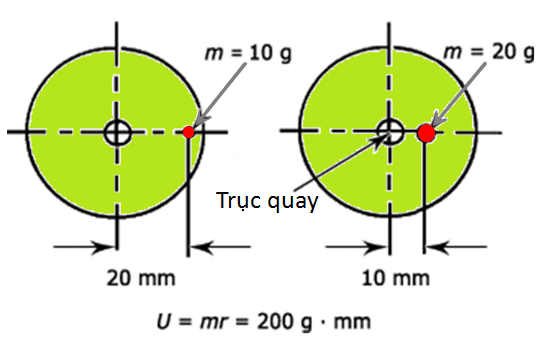
Đo lường định lượng của sự mất cân bằng của một rotor thu được xác định bằng tích số của khối lượng mất cân bằng m với khoảng cách r tính từ trục quay (bán kính). Giá trị tính đó chính là lượng mất cân bằng U = m·r. Đơn vị của lượng mất cân bằng là g·mm.Một lượng mất cân bằng 200 g·mm chỉ ra rằng ” đốm nặng” của rotor tương đương sẽ là, ví dụ, một khối lượng 10 gram ở bán kính 20 mm hoặc một khối lượng của 20 gram ở bán kính 10 mm như thể hiện ở hình dưới. Tương tự như vậy , giá trị lượng mất cân bằng tạo bởi một khối lượng nhất cho trước sẽ thay đổi tùy theo khoảng cách từ khối lượng này đến trục quay.
4. Nguyên nhân gây mất cân bằng
Yếu tố hoặc thậm chí là một sự kết hợp của nhiều yếu tố, có thể giải thích sự hiện diện của một sự mất cân bằng trong các rotor của máy có chuyển động quay. Các nguyên nhân phổ biến nhất là sự không đồng nhất của vật liệu, dung sai chế tạo và lắp ráp cũng như thay đổi vật lý của rotor khi hoạt động.
a, Vật liệu không đồng nhất!
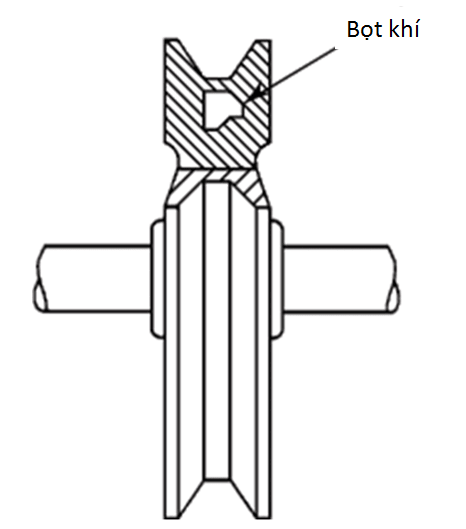
Đôi khi có những lỗ hổng trong các rotor bằng gang như cánh máy bơm và pu-li cỡ lớn như thể hiện trong hình dưới đây. Những lỗ hổng hay bọt khí được hình thành trong quá trình đúc. Một khiếm khuyết như vậy không thể được phát hiện bằng mắt thường. Tuy nhiên, nó là một nguồn tiềm năng của sự mất cân bằng.
b. Dung sai chế tạo và lắp ráp
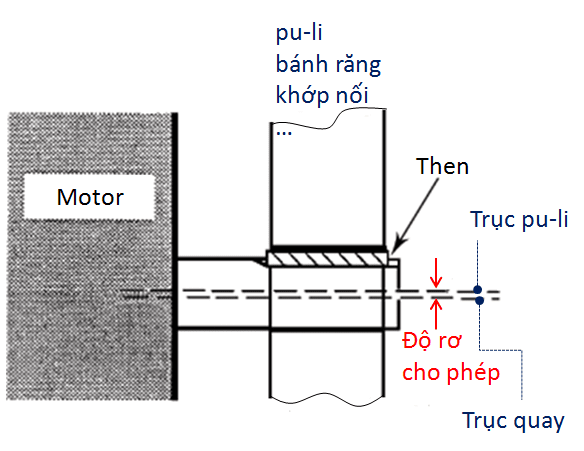
Một trong các nguồn gây mất cân bằng thường gặp là sự tích lũy độ rơ cho phép khi lắp đặt máy. Ví dụ ở hình dưới đây là điển hình về việc dung sai cho các chi tiết khác nhau tích lũy tạo ra một sự mất cân bằng. Các lỗ của pu-li nhất thiết phải lớn hơn đường kính của trục và khi gắn then hay dùng vít khóa chặn sẽ dẫn đến làm lệch tâm pu-li về một bên của trục quay gây mất cân bằng.
c. Sự thay đổi rotor khi hoạt động
Thậm chí nếu một chi tiết đã được cân bằng tốt ngay khi sản xuất thì vấn đề biến dạng nhiệt, sự ăn mòn và xuống cấp hoặc bám bẩn của rotor vẫn có thể làm thay đổi sự cân bằng ban đầu của nó.
Biến dạng nhiệt
Ta gọi “biến dạng nhiệt” là biến dạng của rotor sinh ra do có sự thay đổi nhiệt độ. Kim loại giãn nở khi bị nóng lên. Tuy nhiên, do những sai lệch nhỏ về phân bố vật liệu, kích thước và sự tăng nhiệt không đồng đều nên rotor sẽ giãn nở cũng không đều. Điều này dẫn đến sự phân bố khối lượng của rotor không đồng đều gây mất cân bằng. Hiện tượng này thường xảy ra đối với motor điện, máy nén và các máy turbo là các loại máy hoạt động ở nhiệt độ cao.
Vấn đề biến dạng nhiệt đòi hỏi rotor nên được cân bằng ở nhiệt độ làm việc của nó dù rằng nó đã được cân bằng tốt ở nhiệt độ thường.
Sự ăn mòn và xuống cấp
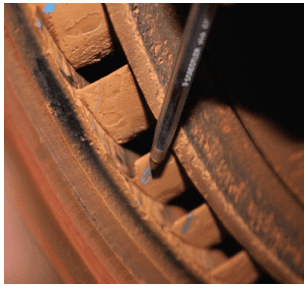
Các loại rotor sử dụng trong vận chuyển sản phẩm (con lăn, ru-lô băng tải,…) thường bị ăn mòn, bong tróc. Sự mất cân bằng diễn ra khi sự ăn mòn, bong tróc không đều trên toàn bộ bề mặt rotor.

Sự bám bẩn
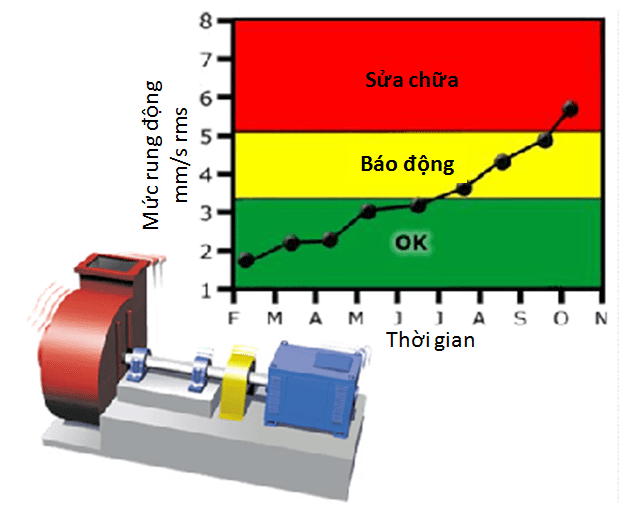
Các rotor có thể dần mất cân bằng do sự bám bẩn không đồng đều trên cánh của chúng (quạt công nghiệp, cánh bơm nước). Sự tích tụ dần dần của các lớp bẩn làm tăng sự mất cân bằng và độ rung mà kết quả có thể nhanh chóng trở nên nghiêm trọng . Đôi khi sự bám bẩn trên rotor là khá đồng nhất . Vấn đề rung động sau đó phát sinh khi một phần của các lớp bám bẩn này bị bong ra gây mất cân bằng.
d. Lực mất cân bằng
Để hiểu rõ cách khử lượng mất cân bằng, cần phải nắm khái niệm về các lực tác động lên rotor ra sao. Bản chất của các lực này phụ thuộc chủ yếu vào dạng mất cân bằng: mất cân bằng tĩnh, mất cân bằng ngẫu lực hoặc mất cân bằng hỗn hợp. Hai loại sau còn có thể gọi là mất cân bằng động theo cách nói thông thường.Không thể nói về các lực mất cân bằng mà không đề cập các khái niệm về trọng tâm (Cg), trục quán tính chính và vận tốc góc (w) . Thật vậy, ngay cả định nghĩa về các dạng mất cân bằng khác nhau cũng đề cập đến vị trí của CG và của trục quán tính chính đối với trục của rotor .Bất kỳ vật thể nào đều có một điểm mà tại đó, nếu được treo lên theo bất kỳ hướng nào, nó sẽ vẫn ở trạng thái cân bằng . Ta gọi điểm này là trọng tâm (Cg) .Trọng tâm của một chi tiết quay nằm trên một trục mà khối lượng của rotor được phân bổ đều cho mỗi bên. Ta gọi trục này trục quán tính chính. Ở một rotor cân bằng, trục quán tính chính trùng với trục quay của rotor.Vận tốc góc (w) của bất kỳ chi tiết quay nào thu được bằng cách nhân tần số f tính bằng Hz với 2p tương ứng với một vòng quay của rotor (360°). Ngoài ra w = 2×p×f với đơn vị đo lường tính bằng radian trên giây (rad/s).
5. Mất cân bằng tĩnh
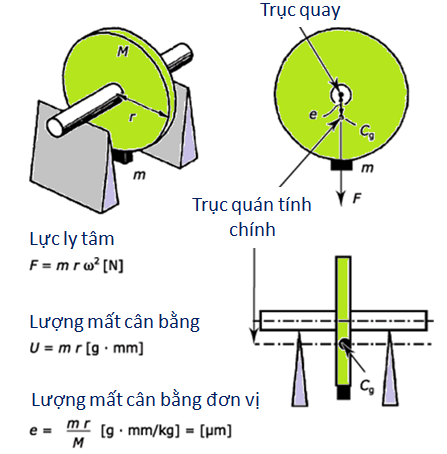
Đây là trường hợp đơn giản nhất của sự mất cân bằng. Áp dụng cho một đĩa mỏng có độ dày đồng nhất và có khối lượng M (kg) hoàn toàn cân bằng trên đó ta gắn một khối lượng nhỏ m (g) ở một khoảng cách r (mm) từ trục quay để tạo ra một lượng mất cân bằng U = mr (g×mm).Tacó thể thấy trên hình dưới đây là sự mất cân bằng này có tác dụng chuyển trọng tâm Cg đi một khoảng cách e đối với trục quay. Sự mất cân bằng tĩnh chính là điều kiện trong đó rotor có trục quán tính chính được dịch chuyển song song với trục quay rotor.Khi đĩa quay ở tốc độ w, lực ly tâm F (N) được tạo ra bởi sự quay của khối lượng mất cân bằng m được tính theo công thức
F = m×r×w2
. Lực ly tâm này tương đương với lực tạo bởi sự dịch chuyển e của trọng tâm đĩa đối với trục quay tính như sau:
F = M×e×w2
. Từ hai cách tính này ta rút ra e = mr/M và vì U = mr, nên cuối cùng ta có được biểu thức e = U/M trong đó sự dịch chuyển e của trọng tâm cũng là lượng mất cân bằng đơn vị hoặc lượng mất cân bằng trên một đơn vị khối lượng rotor (g·mm/kg hay µm).
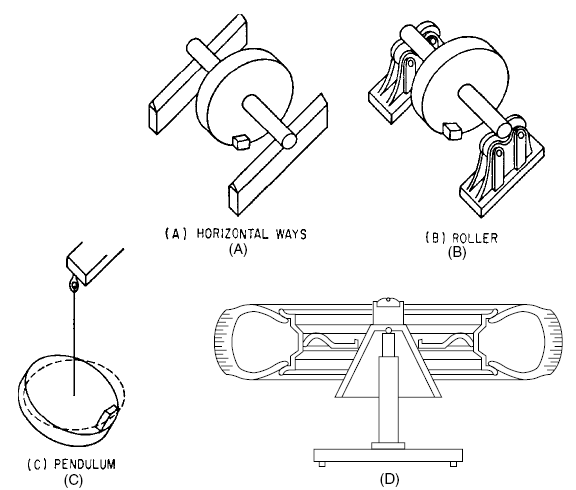
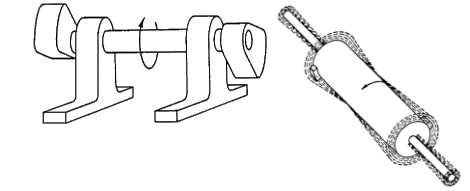
Để khử mất cân bằng tĩnh, ta phải đưa trọng tâm về trục quay của rotor. Việc này được thực hiện bằng cách đặt một khối lượng đối diện với khối lượng mất cân bằng qua tâm và ở cùng khoảng cách bán kính.Khi lượngmất cân bằng là đủ lớn, ta có thể khử sự mất cân bằng tĩnh mà không cần phải quay rotor. Thật vậy, chỉ cần đặt đĩa lên 2 thanh dao đặt song song nhau để “đốm nặng” của rotor tự rơi xuống như ở vị trí tương tự ở hình dưới. Sử dụng khối V con lăn (B), con lắc treo (C) hay trụ cân bằng treo ngược (D).
Hơn nữa, sự mất cân bằng tĩnh có thể được đo đạc với độ chính xác cao hơn nhiều bằng cách quay rotor ở tốc độ cao. Việc đo lượng mất cân bằng và điều chỉnh (tức khử) nó đi sau đó được thực hiện bằng cách sử dụng máy cân bằng động.
Xem thêm: Có Hứng Thú Tiếng Anh Là Gì ? Nghĩa Của Từ Sự Hứng Thú Trong Tiếng Anh
Nhiều rotor có mỏng như bánh đà, cánh bơm, quạt hướng trục,…thường có đường kính lớn7-10 lần bề dày của chúng nên chỉ cần xem xét cân bằng dạng tĩnh. Tuy nhiên, hầu hết các rotor có bề dầy đáng kể so với đường kính trục thì cần phải tiến hành cân bằng dạng ngẫu, cân bằng dạng hỗn hợp gọi chung là cân bằng động.
6. Mất cân bằng ngẫu lực
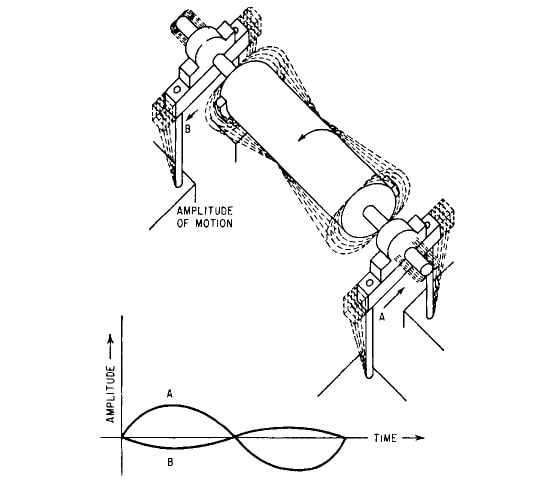
Rotor hình trụ thể hiện trong hình sau đây có một sự mất cân bằng gây ra bởi hai khối m1 và m2giá trị như nhau, đặt đối xứng chéo nhau qua trọng tâm. Rotor ở trạng thái cân bằng tĩnh, tức là trọng tâm nằm trên trục quay của rotor.
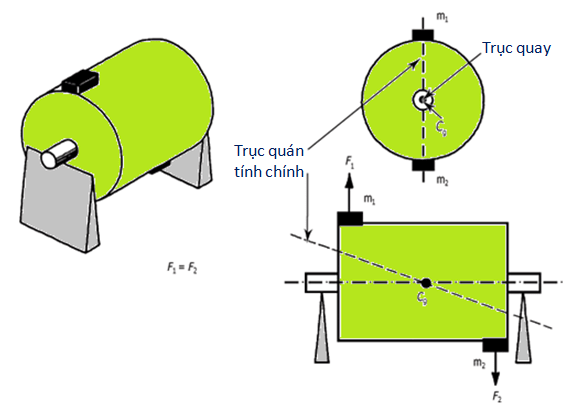
Tuy nhiên , khi rotor quay, F1 và F2 tạo ra bởi hai khối m1 và m2 làm xoay trục quán tính chính lệch khỏi trục quay rotor. Sự mất cân bằng ngẫu lực đặc trưng cho tình trạng của một rotor có trục quán tính chính cắt trục quay rotor tại trọng tâm rotor.Sự mất cân bằng ngẫu lực tạo ra rung động mạnh trên cả hai mặt nơi các lực tác động. Ta có thể khử kiểu mất cân bằng này bằng cách cân bằng động (trên máy cân bằng động) và xử lý mất cân bằng tại cả hai mặt. Mất cân bằng ngẫu chỉ được phát hiện khi cho rotor quay và bắt buộc phải xử lý nhờ vào máy cân bằng động.
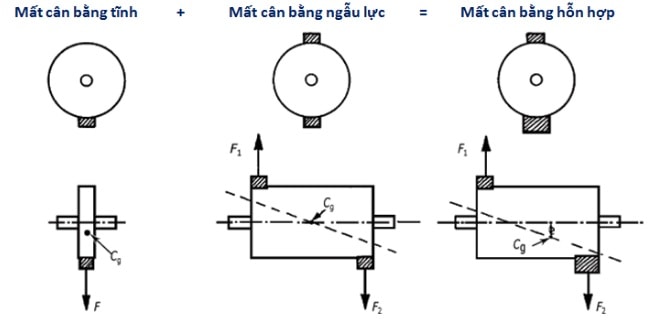
7. Mất cân bằng hỗn hợp
Mất cân bằng hỗn hợp (tổng quát gọi là mất cân bằng động) là điều kiện trong đó rotor có trục quán tính chính không song song mà cũng không giao nhau với trục quay rotor. Hình dưới đây cho thấy sự mất cân bằng hỗn hợp là một sự kết hợp của mất cân bằng tĩnh và mất cân bằng ngẫu lực; là loại mất cân bằng phổ biến nhất của rotor.Để khử mất cân bằng hỗn hợp hay mất cân bằng động ,ta đo độ rung khi quay rotor và sau đó bù sự mất cân bằng này trên cả hai mặt. Mất cân bằng dạng này chỉ có thể được phát hiện bằng máy cân bằng động.
8. Ranh giới giữa cân bằng tĩnh và cân bằng động
Khi vật quay mất cân bằng ngẫu lực hoặc hỗn hợp thì do tồn tại ngẫu lực hay moment nên không thể dùng cân bằng tĩnh để khử. Chỉ khi ngẫu lực do cặp lực này sinh ra nhỏ, tức là chiều dầy của vật quay nhỏ hơn khá nhiều so với đường kính của nó, lúc đó vật có thể được xem là chỉ mất cân bằng tĩnh. Vấn đề đặt ra là vật quay mỏng bao nhiêu thì được xem là chỉ mất cân bằng tĩnh. Thực tế cân bằng cho thấy vật quay dầy nếu quay ở tốc độ thấp thì vẫn có thể dùng phương pháp cân bằng tĩnh để cân bằng, ngược lại vật quay mỏng nếu quay ở tốc độ cao thì đòi hỏi phải cân bằng động. Rõ ràng ranh giới giữa cân bằng tĩnh và động chưa rõ rệt và hiện nay ở mỗi nước có quy ước riêng để phân loại.
Theo tài liệu “Sổ tay cân bằng động” (Mechanalysis, IRD-1977), thì ranh giới giữa cân bằng động và cân bằng tĩnh được xác định theo giản đồ sau:
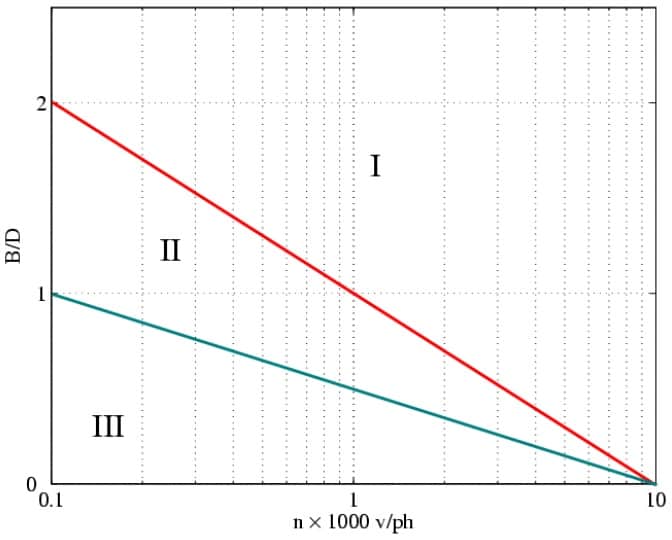
Ranh giới giữa mất cân bằng tĩnh và động
Miền I – vật quay buộc phải cân bằng động;
Miền II – vật quay có thể được cân bằng tĩnh hoặc động tùy vào độ chính xác và yêu cầu làm việc;
Miền III – vật quay chỉ cần cân bằng tĩnh.
9. Một số phương pháp cân bằng vật quay
Cân bằng vật quay có thể được xem xét theo hai cách:
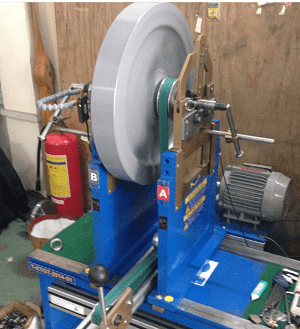
(i)Cân bằngtrên máy cân bằng động: Khi vật quay được tháo ra khỏi máy, việc cân bằng nó có thể được thực hiện trên băng thử đặc biệt được thiết kế riêng cho việc cân bằng, gọi là máy cân bằng. Có hai loại máy cân bằng:
Máy cân bằng gối đỡ cứng:
Việc cân bằng phải được thực hiện tại vận tốc quay thấp hơn nhiều vận tốc tới hạn thứ nhất của cụm vật quay-ụ đỡ. Ta đo các phản lực động do vật quay tác động lên các gối đỡ nhờ vào các cảm biến lực rung (sử dụng vật liệu áp điện) riêng rẽ trên các gối đỡ. Đa số các loại máy cân bằng động hiện có trên thị trường thuộc loại này. Ưu điểm nổi bật của chúng là sự ổn định trong vấn đề truyền động, dễ hiệu chuẩn và có kết cấu nhìn chung rất cứng vững. Nhờ vậy, hệ thống hai cảm biến đo lực rung động tích hợp trên máy có tuổi thọ làm việc rất cao.
Máy cân bằng gối đỡ mềm:
Trong trường hợp này, người ta thực hiện việc cân bằng tại vận tốc quay vượt quá các tốc độ tới hạn của cụm vật quay – ụ đỡ. Dao động của các gối đo được nhờ vào các cảm biến chuyển vị, cảm biến vận tốc hay cảm biến gia tốc.
( ii) Cân bằng tại chỗ:trong trường hợp này, vật quay được cân bằng ngay trên các gối đỡ của chính máy chứa nó (có độ cứng đàn hồi nói chung là không xác định) tại vận tốc quay làm việc của máy. Việc cân bằng tại chỗ rất thuận tiện đối với các chi tiết có kích cỡ quá khổ mà việc tháo ráp khỏi máy, việc chuyên chở trở thành vấn đề lớn. Cân bằng tại chỗ không áp dụng được cho các loại chi tiết bị bao kín hoàn toàn như môtơ, máy bơm và máy nén. Lúc đó việc sử dụng máy cân bằng là bắt buộc. Cũng cần lưu ý là việc cân bằng tại chỗ thì cho độ chính xác cân bằng kém hơn so với cân bằng trên máy. Thực tế những thiết bị cân bằng cho phép cân bằng các vật quay từ vài tấn đến 20.000 tấn vẫn được chế tạo theo yêu cầu đặc biệt (các sản phẩm của hãng TESTWELL, SCHENCK, IRD, CEMB,…).

10. Tiêu chuần cân bằng động
10.1 Dung sai cân bằng
Khi bàn về vấn đề cân bằng, chúng ta thường nhắc đi nhắc lại rằng chi tiết phải “ được cân bằng với một mức độ chấp nhận được”. Nhưng thế nào là một “mức độ chấp nhận được” cho mất cân bằng? Không thể có chuyện một chi tiết được cân bằng hoàn toàn, việc cố gắng đạt được một sự cân bằng gần hoàn hảo là không thực tế hoặc không khả thi về mặt kinh tế.
Đối với các rotor được cân bằng tại chỗ, mức chấp nhận được thông thường được xác định bởi mức dao động của ổ đỡ và trục. Các cấp độ này được thiết lập bởi nhà sản xuất máy hoặc bởi nhà sử dụng nhờ vào các kinh nghiệm đã có được.
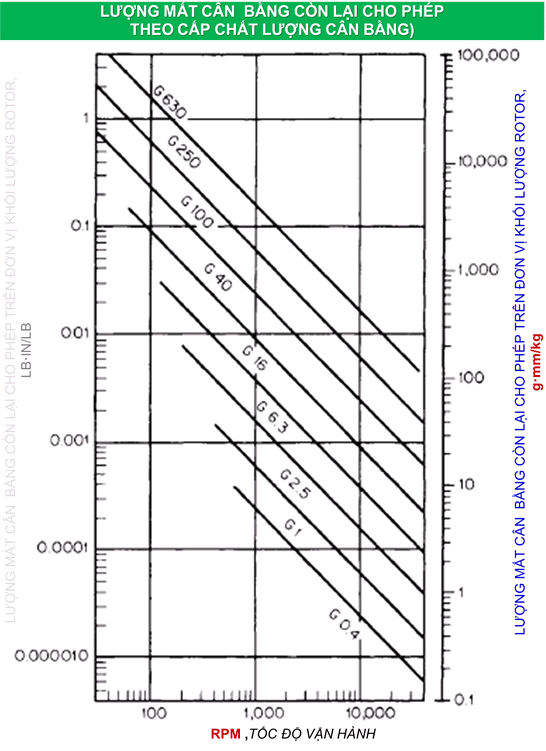
Quay lại những năm 50 nhiều công trình đã được thực hiện ở Đức nhằm thu thập các kinh nghiệm của các kỹ sư làm việc trong lãnh vực này. VDI2060, đã trở thành tiêu chuẩn quốc tế như theo đề nghị củaISO Tiêu chuẩn 1940,“chất lượng cân bằng của các vật quay cứng”. Những đề nghị này liên quan đến lượng mất cân bằng còn lại cho phép đối với tốc độ làm việc tối đa của rotor, liên quan đến các nhóm rotor điển hình với các phân hạng về cấp chất lượng.
Thực nghiệm chỉ ra rằng chất lượng cân bằng của một vật quay cứng có thể được đánh giá thông qua tốc độ vòng của khối tâm:

Thông số này là cơ sở của sự phân loại các vật quay thông dụng. Trong tiêu chuẩn ISO 1940-1973, đơn vị đánh giá chất lượng cân bằng được định nghĩa như sau:
1G= 1mm/giây
Cấp độ chất lượng,G, (tương đương với tícheadm´ w cho một rotor không) cho phép thực hiện việc đổi chiều ứng xử của máy chạy ở các tốc độ khác nhau mà ta quan sát được. Các giá trị G trong tiêu chuẩn tương đương với độ lệch tâm e tính bằng µm cho một rotor quay ở 9500 vòng/phút. Cấp chất lượng, hay độ mất cân bằng, của một rotor có thể đánh giá được nhờ sử dụng một máy cân bằng đã được hiểu chuẩn (calibrated balancing machine).
10.2 Chỉ tiêu dao động
Đối với các máy móc đang vận hành, các dao động do mất cân bằng gây ra chịu ảnh hưởng đáng kể các đặc tính vật lý của ổ đỡ và bệ máy. Thuận tiện nhất là đánh giá chất lượng hoạt động của máy bằng việc sử dụng các mức dao động như được đề nghị trong nhiều tiêu chuẩn như VDI2056, được chuẩn hóa quốc tế thànhISO 2372,“Dao động Cơ học của Máy móc với Tốc độ vận hành từ 10 đến 200 vòng/giây”. Các tiêu chuẩn này đưa ra các chỉ dẫn khi việc vảo trì trên một máy đang hoạt động được đặt ra. Khi nguồn dao động chính là mất câng bằng Tiêu chuẩn có thể được sử dụng như là một cơ sở để chỉ định cấp độ dao động còn lại cho phép.
Các tiêu chuẩn hữu dụng khác liên quan đến thiết bị cân bằng gồmISO 2953,“Máy cân bằng – Mô tả và đánh giá”vàISO 2371,“Thiết bị cân bằng tại chỗ – Mô tả và đánh giá”.
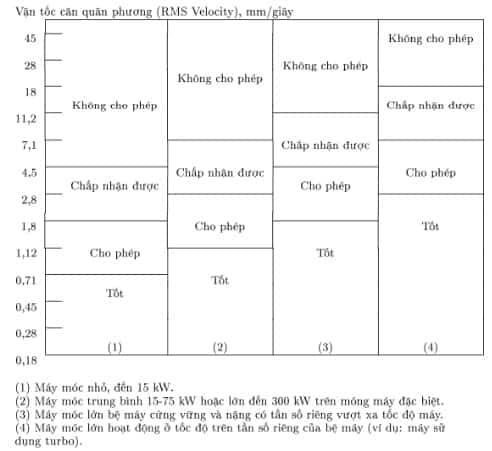
Biểu đồ chỉ tiêu dao động (theo VDI 2056)
Trong mọi trường hợp, những tiêu chuẩn này lập thành các quyết định của một ban gồm các nhóm kỹ sư để hướng dẫn các kỹ sư khác: thường phải tiến hành thực nghiệm để chỉ ra làm cách nào các tiêu chuẩn này được vận dụng tốt nhất cho bất cứ vấn đề cân bằng nào được đặt ra.
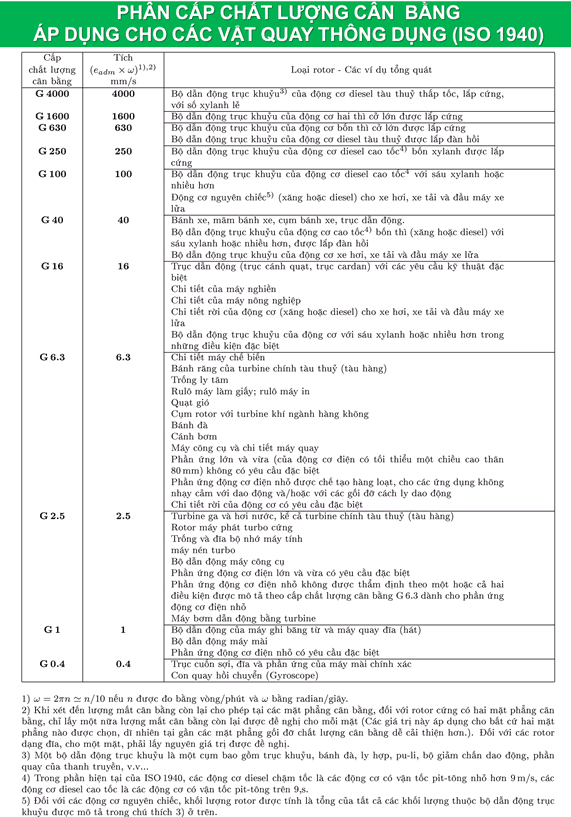
10.3 Tiêu chuẩn ISO 1940 về chất lượng cân bằng vật quay cứng
Bảng sau cung cấp các cấp độ cân bằng theo ISO 1940 (1973), áp dụng cho các loại vật quay thông dụng. Ta cũng có thể biểu diễn dưới dạng đồ thị lượng mất cân bằng còn lại cho phép (chuyển vị của khối tâm, đo bằng µm) theo vận tốc quay, áp dụng cho nhiều cấp độ về chất lượng cân bằng căn cứ theo Bảng sau.
11. Đồ gá
Trừ một số chi tiết đã có trục sẵn, các chi tiết cần cân bằng đòi hỏi phải được lắp lên trục gá chuyên dùng. Nhìn chung trục gá này được chế tạo chính xác với các chi tiết côn, kẹp chữ C, bạc nối,..được xử lý nhiệt, mài cẩn thận. Có như vậy, chúng không “góp” thêm vấn đề mất cân bằng vào chi tiết đang cần được cân bằng.